Autonomous yet coordinated
Researchers try to make "intelligent whole"' from "relatively dumb individuals"
|
|
|
|
|
Naomi Leonard with underwater
glider (Photo by Denise Applewhite)
|

Associate professor Naomi Leonard is part of a project to build a fleet of underwater vehicles that emulate the autonomous yet coordinated motion of a school of fish.
The project, funded by a $2.6 million grant from the National Science Foundation, aims to integrate disparate areas of research, from biologists who will analyze schools of fish to engineers who will develop strategies for coordinating groups of man-made vehicles. The research is expected to culminate three years from now in testing a fleet of a dozen underwater vehicles in DeNunzio Pool.
In the Mechanical and Aerospace Engineering Department, Leonard specializes in nonlinear control theory and its applications. She is one of six scientists from Yale, Harvard, University of Washington and Princeton who are leading the project.
The scientists hope the project will yield insights into an age-old problem in biology: How does a group -- whether schools of fish, flocks of birds or herds of land animals -- move in a synchronized, seemingly intelligent way in the absence of any apparent leadership? "We're going to try to emulate their ability to take the relatively dumb individuals and come up with a more intelligent whole," says Leonard.
One test, for example, might be to put an obstacle in front of the group and see if it can split in two and then rejoin on the other side of the obstacle.
For fish, swimming in groups presents a number of advantages, such as seeming bigger in the face of a predator or being able to sweep for food over a wide area. If applied to man-made vehicles, the same techniques could lead to practical technologies, such as groups of unmanned miniature submarines that search for anything from plumes of pollution to airplane wreckages.
The idea for the research project was originated by Yale professor of electrical engineering A. Stephen Morse, who observed that military researchers were working on a similar idea for airborne unmanned vehicles. It would be easier, Morse thought, to start testing coordinated motion in the water than in the air. So he assembled the team that includes Leonard, and they applied for a Knowledge and Distributed Intelligence grant from the National Science Foundation. He was surprised to find the project among 31 selected from more than 700 applicants.
Morse says that in addition to Leonard's expertise in underwater vehicles, she has a talent for linking theory and application that makes her an invaluable part of the collaboration. "She's a first rate theoretician, and it's unusual to see a theoretician who has such a strong experimental ability," he notes.
Control theory
Leonard's specialty is control theory, a discipline that "broadly speaking, aims to understand, model and control the behavior of dynamical systems," she explains. "My particular interest is in developing theoretical foundations and design methodology for making mechanical systems, such as vehicles and robots, perform automatically in a stable, efficient and reliable manner."
Leonard came to Princeton as a member of the Class of 1985 and returned in 1994 after earning her PhD at the University of Maryland. One line of her research has involved controlling vehicles that have lost the ability to move directly in a certain direction. The research could apply to submarines or spacecraft that have lost one or more of their thrusters or propellers. A everyday example of such a problem is parallel parking: How do you move a car sideways when it has no direct ability to do so?
In another research initiative, Leonard is developing methodologies for the design and control of underwater gliders, which have no thrusters or propellers at all. She has created winged submarines controlled entirely by taking on or expelling water. "By appropriately redistributing mass," she notes, "they control not only not only whether they rise or fall but also how they are oriented in the water. This allows for porpoise-like swimming and spiraling." Such vehicles could be sent out on underwater explorations for months or even years with very little power consumption.
Each of Leonard's projects defies categorization as pure experimentation or pure theory.
|
|
|
|
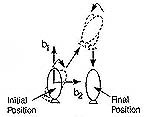
This figure shows how two
types of motion can be combined to move an object
in a third direction (as in parallel parking). When
formalized using differential geometry, these
principles can be used to study locomotion.
|
|
Her favorite problems are ones in which there is a chance to design a system and the control methodology at the same time. So instead building a vehicle and then coming up with a control theory that will make it work, she prefers to integrate the two steps in a way that results in a more efficient and better performing vehicle.
Really messy ones
Pulling real-world problems into the neat world of theory can be fraught with difficulty, but Leonard seems to have a penchant for that kind of trouble. When it comes to picking control problems, she says, "I'm interested in really messy ones." Or, rephrasing herself in more formal language, she says, "I'm interested in systems that have really rich dynamics."
To fuel her interest in experiments, Leonard runs a small lab in which she has a variety of models and simulations that serve as both teaching and research tools. She has working models of her underwater gliders and a small tank to test them in.
She is also assembling a collection of toys and gadgets to illustrate various aspects of control theory when she teaches an upcoming two-week segment in Math Alive, the math class for non-math majors led by math professor Ingrid Daubechies. Leonard says she hopes to give students a sense of how problems such as directing a submarine with a missing propeller can be treated as mathematical questions, revealing solutions that would not be found by intuition or experimentation alone.
It is important, she says, for students to see how two seemingly unrelated problems, when reduced to their mathematical essence, can prove to be the same problem with a common solution.
She notes that focusing solely on the engineering task at hand can lead to solutions that have limited usefulness. "You may have solved your problem, but have you helped anyone else solve theirs? What we're looking for now is new ways of generalizing whole classes of problems."
top